Les robots holonomes et les robots non-holonomes
Les robots holonomes
Il existe enfin une catégorie de robots mobiles qui sont dit "holomes".
Mais avant de voir ce type de robot, il nous faut définir ce que sont les degré de liberté d'une plate-forme mobile ainsi que les robots non holomes.
Degré de liberté
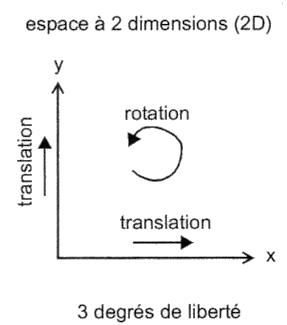
Le nombre de dégré de liberté d'un robot mobile est défini comme le nombre de mouvements indépendants que ce robot peut faire par rapport à un système de coordonnées déterminé.
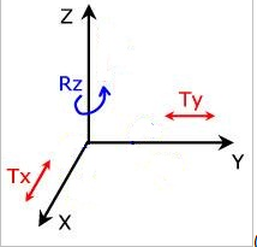
Un robot holonome ou omni-directionnel est un robot qui possédant trois degrés de liberté:
- une translation selon X (Tx) avance ou recule
- une translation selon Y (Ty) va vers la droite ou vers la gauche
- une rotation selon Z (Rz) tourne vers la droite ou vers la gauche
Tout mouvement effectué dans un plan peut être décomposé en un maximum de deux mouvements de translation purs effectués respectivement par rapport aux axes X et Y, plus un mouvement de rotation pur autour de l'axe perpendiculaire au plan.
Le robot holonome est donc capable de se déplacer dans n'importe quelle direction quelque soit son orientation.
Vue de face
Vue de dessus
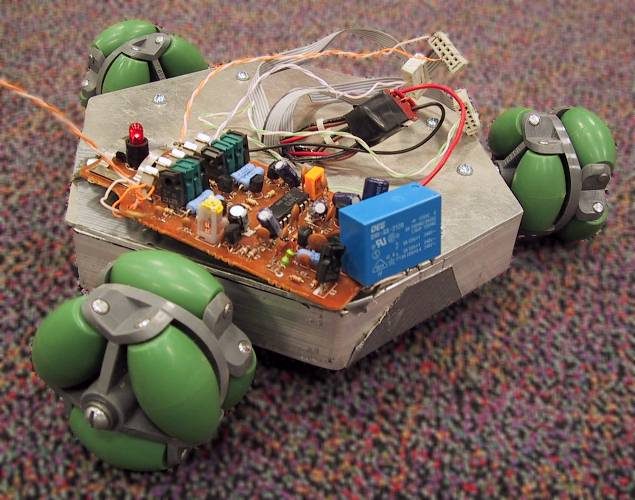
Mécaniquement, on obtient ces trois degrés de liberté en utilisant trois roues dites "holonomes" qui sont en faites des roues à galets. Ce sont des roues qui peuvent tourner librement sur un axe perpendiculaire a l'axe de rotation de la roue.
Les galets sont les pieces vertes sur la première photos ( les roues Vex), les pieces noires sur la deuxième photo et les pièces organes sur la dernière photo :
Les galets sont les pieces vertes sur la première photos ( les roues Vex), les pieces noires sur la deuxième photo et les pièces organes sur la dernière photo :

roue 1

roue 2

roue 3
De plus, ces trois roues doivent être placés à 120° les unes par rapport aux autres.
En donnant à chaque roue une vitesse différente, on peut contrôler la vitesse de rotation, le déplacement par rapport à l'orientation du robot, ainsi que la vitesse de ce déplacement.
Le robot étant holonome on a trouvé judicieux de la développer sur une plateforme ronde étagée :
- Le 1er étage constitue la base du robot. On y trouve 3 roues omnidirectionnelles (120° entre chaque roue) couplées à 3 moto-réducteurs, l’alimentation ainsi qu’une caméra de suivi de ligne centrée entre les 3 moto-réducteurs.
- Les 2ème et 3ème étages servent à la disposition de tout l’équipement électronique (circuits imprimés, capteurs,…)
Au dessus de ces 3 étages vient s’ajouter un mât sur lequel repose le récepteur infrarouge pour la détection des balises.
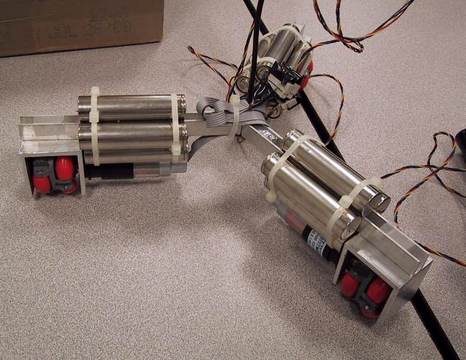
Exemples de robot omni-directionnel a 3 roues :
Pour faire un robot holonome a 3 roues il faut disposer les 3 moteurs (avec les 3 roues ! ) a 120 degres
Comme sur les photos ci-dessous :
En donnant à chaque roue une vitesse différente, on peut contrôler la vitesse de rotation, le déplacement par rapport à l'orientation du robot, ainsi que la vitesse de ce déplacement.
Le robot étant holonome on a trouvé judicieux de la développer sur une plateforme ronde étagée :
- Le 1er étage constitue la base du robot. On y trouve 3 roues omnidirectionnelles (120° entre chaque roue) couplées à 3 moto-réducteurs, l’alimentation ainsi qu’une caméra de suivi de ligne centrée entre les 3 moto-réducteurs.
- Les 2ème et 3ème étages servent à la disposition de tout l’équipement électronique (circuits imprimés, capteurs,…)
Au dessus de ces 3 étages vient s’ajouter un mât sur lequel repose le récepteur infrarouge pour la détection des balises.
Exemples de robot omni-directionnel a 3 roues :
Pour faire un robot holonome a 3 roues il faut disposer les 3 moteurs (avec les 3 roues ! ) a 120 degres
Comme sur les photos ci-dessous :
Comment ça marche ?
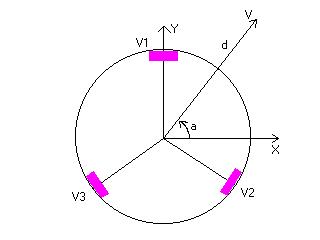
- En rose : les 3 roues
- Soit V1, V2 et V3 les vitesses respectives de roue1, roue2 et roue3.
- Vi est positif quand la roue tourne dans le sens horaire (vu de l'exterieur du robot)
- Soit d1, d2 et d3 les distances respectives que les roue1, roue2 et roue3 doivent parcourir.
- Les angles formes par roue1 roue2, roue2 roue3 et roue3 roue1 sont egales a 120 degres
- Le centre du robot se deplace a vitesse V avec un angle a (exprime en degre) sur une distance d
Pour les vitesses :
- V1 = V * sin( a - 90)
- V2 = V * sin( a + 30)
- V3 = V * sin( a + 150)
- d1 = d * sin( a - 90)
- d2 = d * sin( a + 30)
- d3 = d * sin( a + 150)
Cela parait simple ?
Ben oui, mais il y a un gros probleme.
Les accelerations de chaque roue doivent etre proportionnelles !!!!!
Soit x(t) l'equation d'acceleration,
Il faut respecter :
- V1 = x(t) * V * sin( a - 90)
- V2 = x(t) * V * sin( a + 30)
- V3 = x(t) * V * sin( a + 150)
Ce qui ce resume par une incapacité a effectuer des lignes droites, et donc une incapacite a se rendre d'un point a un autre .
.
Il existe plusieurs sortes de robot holonome :

un robot à pattes

un robot rampant

un robot à 3 roues omni-directionnelles

un robot à 4 roues omni-directionnelles
Robots non-holonomes
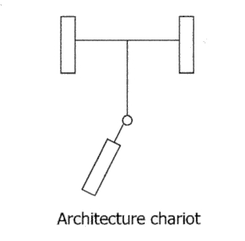
Une plate-forme mobile de type chariot ne dispose que de 2 degrés de liberté sur un plan puisque les translations latérales sont impossibles à réaliser :
Une plate-forme mobile de type chariot ne dispose que de 2 degrés de liberté sur un plan puisque les translations latérales sont impossibles à réaliser :
- Une translation : avance ou recule.
- Une rotation : tourne vers la droite ou vers la gauche.
Exemples des robots non-holonomes :
Contraintes de roulement sans glissement :
Présentation des robots de type voiture :
Contraintes de roulement sans glissement :
- robots mobiles à roues ;
- manipulation par des mains robotisées.
- Conservation du moment angulaire :
- robots manipulateurs flottant dans l’espace ;
- satellites avec roues à inertie ;
- robots astronautes, plongeurs, sauteurs (phase de vol).
- Autres sources de contraintes non-holonomes :
- loi de Lorentz-Wong en électromagnétisme ;
- réduction par symétrie de cinématiques holonomes
Présentation des robots de type voiture :
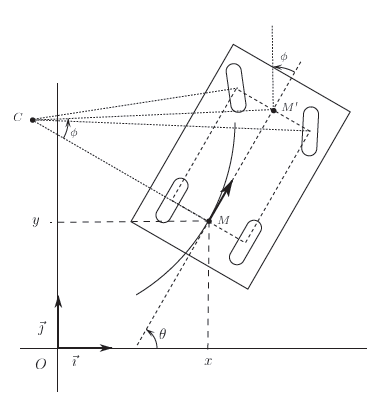
Nous présentons maintenant un système dynamique modèlisant une voiture.Nous voulons seulement rendre compte d'une propriété géométrique des trajectoires faisable par un robot de type voiture. Dans ce cadre pour une réalisation relativement fine d'une voiture, il est naturel de considérer que le conducteur contrôle l'accélération linéaire des roues ainsi que la vitesse angulaire des roues. Un vecteur d'état du véhicule est alors a propriété, défini par ( x,y,Ɵ,v,Ø ) où x et y sont les coordonnés du milieu de l'essieu arrière pris comme point de référence du robot, Ɵ détermine la direction du véhicule et informellement, v représente sa vitesse linéaire et Ø l'angle que font les roues avant avec l'axe du véhicule. La contrainte sur le rayon de giration du véhicule se traduit par |ø| ≤ Ø0. Si α et β sont les valeurs de l'accélération linéaire des roues et de la vitesse angulaire des roues à un instant donné, les contraintes cinématiques s'écrivent :
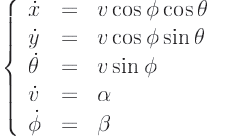
La contrainte cinématique correspondant à un roulement sans glissement se traduit par le fait que la vitesse du robot est tangente à l'axe du robot c'est à dire :

